





Nuevo intento de alunizaje para la empresa japonesa Ispace
- Tratará además de desplegar un róver de fabricación europea
- La anterior nave de esta empresa acabó estrellándose en la Luna

El módulo de aterrizaje Resilience de la firma japonesa ispace, lanzado el 15 de enero, tiene prevista su llegada a la superficie lunar este 5 de junio a las 19.17 UTC, informó la compañía.
Resilience es el componente espacial de la Misión 2 de ispace "SMBC x HAKUTO-R Venture Moon", el último paso en el programa de exploración lunar de la compañía.
Se lanzó a bordo de un cohete SpaceX Falcon 9 desde Cabo Cañaveral e intentará aterrizar en el 'Mare Frigoris' lunar.

El primer aterrizaje de precisión acabó haciendo el pino sobre la Luna
La nave pasará aproximadamente dos semanas realizando experimentos en la superficie lunar para los socios comerciales e institucionales de la misión.
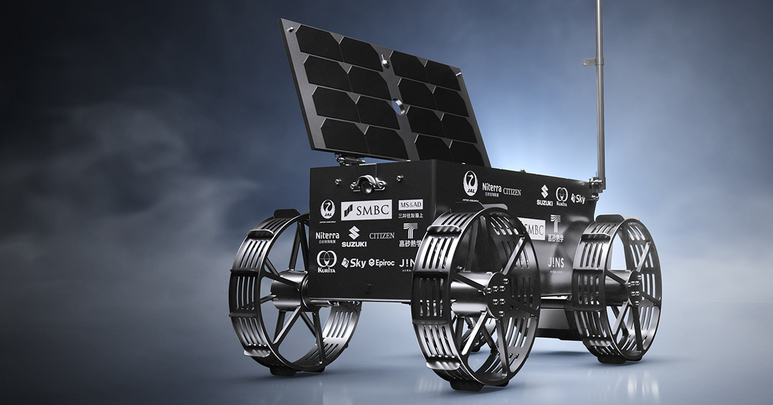
PRIMER ROVER LUNAR EUROPEO
El módulo de aterrizaje también desplegará el primer róver lunar de fabricación europea, llamado Tenacious.
La filial luxemburguesa de la compañía (ispace Europe) diseñó, fabricó y ensambló este micro-róver ligero.
Resilience incluye otras cargas útiles científicas y culturales como un dispositivo de electrolisis de agua lunar, un módulo para la producción de alimentos en la Luna y una sonda de radiación en el espacio profundo.
ispace ya alcanzó la superficie lunar en abril de 2023 con su primera misión al satélite, denominada HAKUTO-R misión 1, si bien se perdió la comunicación y no se pudo confirmar un alunizaje controlado