La NASA envía el primer robot quirúrgico al espacio
- El dispositivo completará tareas quirúrgicas simuladas en la Estación Espacial Internacional
El primer robot quirúrgico espacial vuela a la Estación Espacial Internacional (ISS) como parte de la carga de una nave de abastecimiento Cygnus que despegó este martes desde Cabo Cañaveral.
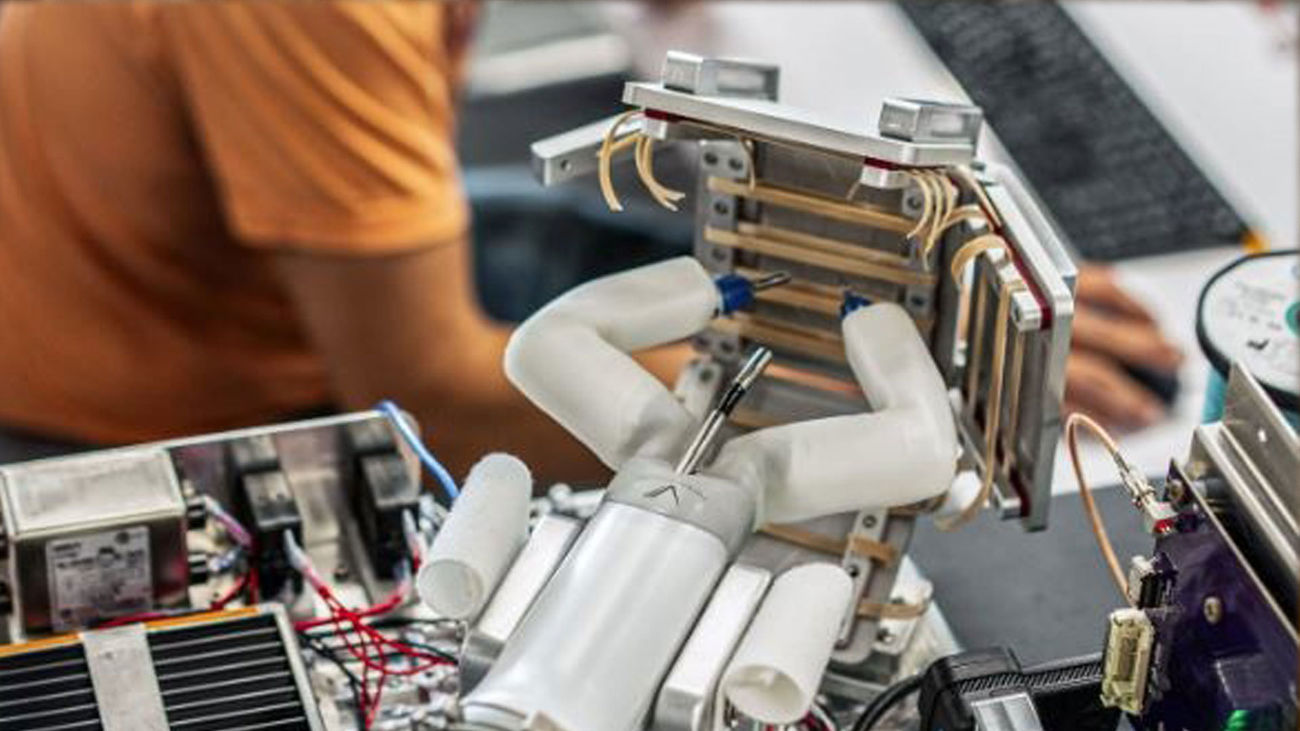
Robotic Surgery Tech Demo (RSTD) utiliza un novedoso robot quirúrgico en miniatura que completará tareas quirúrgicas simuladas en órbita, tanto de forma autónoma como controlada remotamente por un usuario desde la Tierra.

Despega con éxito la primera misión espacial comercial completamente europea con Miguel López Alegría al mando
El propósito de esta investigación de la NASA y la Universidad de Nebraska es evaluar el desempeño de un robot en la ejecución de tareas quirúrgicas simuladas en un entorno de vuelo espacial orbital.
Realizar tareas quirúrgicas remotas en el espacio introduce nuevos desafíos que no se ven en la Tierra, incluida la microgravedad y una mayor latencia.

Un robot quirúrgico con tecnología española permitirá operaciones de columna hasta ahora imposibles
En modo autónomo, el robot ejecuta un subconjunto de tareas quirúrgicas de forma independiente. Durante esta fase, el robot realiza movimientos predeterminados para completar las tareas deseadas.
En el modo de red, el robot es controlado por un usuario quirúrgico desde una interfaz terrestre.
Las tareas se organizan en todo el espacio de trabajo del robot para que el dispositivo pueda moverse en todo el rango de movimiento para completar las tareas.
Comparar los datos a bordo con los datos de las mismas pruebas realizadas en la Tierra puede informar el diseño de sistemas quirúrgicos robóticos para brindar atención médica durante futuras misiones de larga duración, informa la NASA.